凸优化笔记25:原始对偶问题 PDHG
前面的章节要么从原始问题出发,要么从对偶问题出发,通过求解近似点或者一个子优化问题进行迭代,而且推导过程中我们发现根据问题的参数特征,比如矩阵 \(A\) 是瘦高型的还是矮胖型的,采用对偶和原始问题的复杂度会不一样,可以选择一个更简单的。而这一节,我们将要从原始对偶问题出发来优化,什么是原始对偶问题呢?就是原始优化变量和对偶优化变量(原始函数和共轭函数)混合在一块,看下面的原理就知道了。
1. 原始对偶问题
现在考虑原始优化问题,其中 \(f,g\) 为闭凸函数 \[ \min \quad f(x)+g(Ax) \] 这个问题我们前面遇到好多次了,一般都是取 \(y=Ax\) 加一个约束条件然后计算拉格朗日函数(自己拿小本本写一下),再求解 KKT 条件对吧。好,让我们列出来 KKT 条件:
- 原始可行性:\(x\in\text{dom}f,Ax=y\in\text{dom}g\)
- \(x,z\) 是拉格朗日函数的最小值点,因此 \(-A^Tz\in\partial f(x),z\in\partial g(y)\)
其中 \(z\in\partial g(y)\iff Ax=y\in\partial g^\star(z)\)。也就是说,要想求解 KKT 条件,我们需要的实际上是求解下面一个“方程” \[ 0 \in\left[\begin{array}{cc}0 & A^{T} \\-A & 0\end{array}\right]\left[\begin{array}{l}x \\z\end{array}\right]+\left[\begin{array}{c}\partial f(x) \\\partial g^{\star}(z)\end{array}\right] \]
Remarks:这个式子可重要啦,后面还会用到!而且他从集合的角度揭示了我们求解最优值问题的本质,那就是找一个包含关系。
比如上面的这个式子我们用一个算子来表示为 \(T(x,z)\),我们求解最优值实际上要就是找满足 \(0\in T(x,z)\) 的解 \((x^\star,z^\star)\)。而对一个简单的优化问题 \(\min f(x)\),我们实际上就是在找满足 \(0\in\partial f(x)\) 的 \(x^\star\),这个时候我们可以把次梯度看作是一个算子。
在这一章的后面几个小节,我们将从算子的角度重新来看待优化问题,看完之后可以再回到这里细细品味。
好我们先把这个东西放一放,再来看看另一个跟拉格朗日函数有关的函数
\[
\begin{aligned}
h(x,z)&=\inf_{y}L(x,y,z)\\
&=f(x)-g^\star(z)+z^TAx
\end{aligned}
\] 如果计算 \(0\in\partial
h(x,z)\)
是不是就是上面那个方程?!也就是说上面很重要的那个方程实际上就是在求解
\(h(x,z)\) 的鞍点!很容易理解,因为 KKT
条件本质上就是在求拉格朗日函数的鞍点(当然,如果存在不等式约束就不一定是鞍点了)。大家注意,你看这个
\(h\) 他又长又宽,这个 \(h\) 同时包含了原始变量 \(x\) 和对偶变量 \(z\),同时还既有原始函数 \(f\) 又有对偶函数 \(g^\star\),所以我们叫他原始对偶优化问题,\(h\) 也是部分拉格朗日函数(partial
Lagrangian)。
2. PDHG
前面说了我们要求解的问题是 \[ 0 \in\left[\begin{array}{cc} 0 & A^{T} \\ -A & 0 \end{array}\right]\left[\begin{array}{l} x \\ z \end{array}\right]+\left[\begin{array}{c} \partial f(x) \\ \partial g^{\star}(z) \end{array}\right] \]
PDHG(Primal-dual hybrid gradient method)的迭代格式是这样的 \[ \begin{array}{l} x_{k+1}=\operatorname{prox}_{\tau f}\left(x_{k}-\tau A^{T} z_{k}\right) \\ z_{k+1}=\operatorname{prox}_{\sigma g^{*}}\left(z_{k}+\sigma A\left(2 x_{k+1}-x_{k}\right)\right) \end{array} \] 步长需要满足 \(\sigma\tau\|A\|_2^2\le1\)。
是不是看起来跟 DR 方法很像呢?事实上他们两个是等价的,后面会证明。回忆 ADMM,我们每次需要求解的优化问题是 \[ x^{k+1}=\arg\min_x f(x)+\frac{t}{2}\| Ax-y^k+\frac{z^k}{t}\|^2 \] 要求解这个优化问题,我们往往会得到一个线性方程,还需要计算 \((A^TA)^{-1}\),这就很麻烦了。但是观察 PDHG 的迭代格式,我们只需要求解 \(f,g^\star\) 的 \(\text{prox}\) 算子,我们只需要求解 \(A,A^T\) 之间的乘法而不需要求逆了,这就方便很多了。
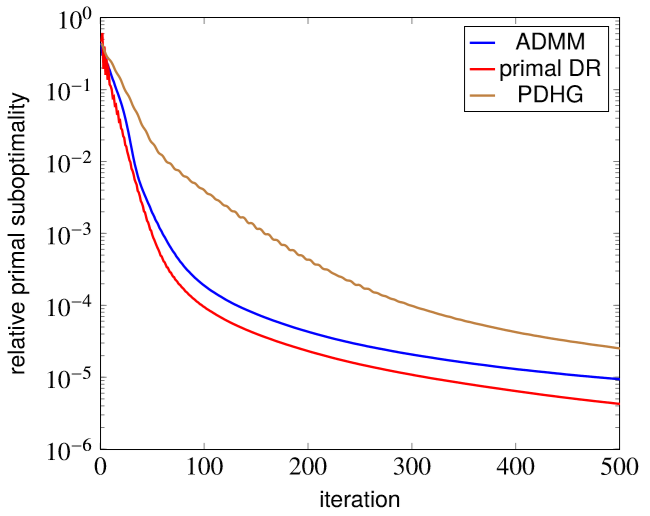
看上面这个例子,我们前面说过 ADMM 等价于 dual DR,不过这个例子里边 PDHG 是最慢的。
下面我们就来证明一下如何从 PDHG 导出 DR 方法。
对于优化问题 \(\min f(x)+g(x)\),实际上相当于 \(\min f(x)+g(Ax),A=I\),另外我们再取 PDHG 中的 \(\sigma=\tau=1\),那么就可以得到 \[ \begin{array}{l} x_{k+1}=\operatorname{prox}_{f}\left(x_{k}-z_{k}\right) \\ z_{k+1}=\operatorname{prox}_{g^{*}}\left(z_{k}+2 x_{k+1}-x_{k}\right) \end{array} \] 这实际上就是 DR Splitting 那一节讲的原始对偶形式。
另外也可以从 DR 方法导出 PDHG。我们可以将原问题 \(\min f(x)+g(A x)\) 改写为 \[ \begin{aligned} \operatorname{minimize} &\quad f(x)+g(A x+B y) \\ \text{subject to} &\quad y=0 \end{aligned} \] 这里边我们可以选择 \(B\) 使 \(AA^T+BB^T=(1/\alpha)I\),其中 \(1/\alpha\ge\|A\|_2^2\)。为什么这么选呢?令 \[ \tilde{g}(x,y)=g(Ax+By)=g\left(\tilde{A}\left(\begin{array}{c}x\\ y\end{array}\right)\right) \] 那么就有 \(\tilde{A}\tilde{A}^T=(1/\alpha)I\),而前面讲 \(\text{prox}\) 算子的时候我们讲了一个性质,满足这个条件的时候 \(\text{prox}_{\tilde{g}}\) 可以用 \(\text{prox}_g\) 来表示。
复习:\(\text{prox}\) 算子的性质
\(f(x)=g(Ax+b)\),对于一般的 \(A\) 并不能得到比较好的性质,但如果 \(AA^T=(1/\alpha)I\),则有 \[ \begin{aligned}\operatorname{prox}_{f}(x) &=\left(I-\alpha A^{T} A\right) x+\alpha A^{T}\left(\operatorname{prox}_{\alpha^{-1} g}(A x+b)-b\right) \\&=x-\alpha A^{T}\left(A x+b-\operatorname{prox}_{\alpha^{-1} g}(A x+b)\right)\end{aligned} \]
我们还可以取 \(\tilde{f}(x,y)=f(x)+\delta_{0}(y)\),那么优化问题就变成了 \(\min \tilde{f}(x,y)+\tilde{g}(x,y)\),应用 DR 方法迭代格式为 \[ \begin{array}{l} {\left[\begin{array}{c} x_{k+1} \\ y_{k+1} \end{array}\right]=\operatorname{prox}_{\tau \tilde{f}} \left(\left[\begin{array}{c} x_{k}-p_{k} \\ y_{k}-q_{k} \end{array}\right]\right)} \\ {\left[\begin{array}{c} p_{k+1} \\ q_{k+1} \end{array}\right]=\operatorname{prox}_{(\tau \tilde{g})^{*}}\left(\left[\begin{array}{c} p_{k}+2 x_{k+1}-x_{k} \\ q_{k}+2 y_{k+1}-y_{k} \end{array}\right]\right)} \end{array} \] 我们需要计算 \(\text{prox}_{\tilde{f}}\) 和 \(\text{prox}_{\tilde{g}}\) \[ \operatorname{prox}_{\tau \tilde{f}}(x, y)=\left[\begin{array}{c} \operatorname{prox}_{\tau f}(x) \\ 0 \end{array}\right] \] \[ \begin{aligned} \operatorname{prox}_{\tau \tilde{g}}(x, y) &=\left[\begin{array}{c} x \\ y \end{array}\right]-\alpha\left[\begin{array}{c} A^{T} \\ B^{T} \end{array}\right]\left(A x+B y-\operatorname{prox}_{(\tau / \alpha) g}(A x+B y)\right.\\ &=\left[\begin{array}{c} x \\ y \end{array}\right]-\tau\left[\begin{array}{c} A^{T} \\ B^{T} \end{array}\right] \operatorname{prox}_{\sigma g^{\star}}(\sigma(A x+B y)) \\ &=\left[\begin{array}{c} x \\ y \end{array}\right]-\operatorname{prox}_{(\tau \tilde{g})^\star}(x, y) \end{aligned} \]
其中 \(\sigma=\alpha/\tau\)。代入到 DR 方法的迭代方程 \[ \begin{array}{l} {\left[\begin{array}{c} x_{k+1} \\ y_{k+1} \end{array}\right]=\left[\begin{array}{c} \operatorname{prox}_{\tau f}\left(x_{k}-p_{k}\right) \\ 0 \end{array}\right]} \\ {\left[\begin{array}{c} p_{k+1} \\ q_{k+1} \end{array}\right]=\tau\left[\begin{array}{c} A^{T} \\ B^{T} \end{array}\right] \operatorname{prox}_{\sigma g^{*}}\left(\sigma\left[\begin{array}{cc} A & B \end{array}\right]\left[\begin{array}{c} p_{k}+2 x_{k+1}-x_{k} \\ q_{k}+2 y_{k+1}-y_{k} \end{array}\right]\right)} \end{array} \] 根据第二个式子应该有 \(\left[\begin{array}{c} p_{k} \\ q_{k} \end{array}\right] \in \text { range }\left[\begin{array}{c} A^{T} \\ B^{T} \end{array}\right]\),因此存在 \(z_k\) 满足 \(\left[\begin{array}{c}p_{k+1} \\ q_{k+1}\end{array}\right]=\tau\left[\begin{array}{c}A^{T} \\ B^{T}\end{array}\right]z_k\)。同时因为 \(AA^T+BB^T=(1/\alpha)I\),所以能找到唯一的 \(z_k\) 同时满足 \(z_k=\sigma(Ap_k+Bq_k)\)。那么把 \(z_k\) 代入到上面的迭代方程,同时消掉 \(y_k=0\),就可以得到 \[ x_{k+1}=\operatorname{prox}_{\tau f}\left(x_{k}-\tau A^{T} z_{k}\right)\\ z_{k+1}=\operatorname{prox}_{\sigma g^{*}}\left(z_{k}+\sigma A\left(2 x_{k+1}-x_{k}\right)\right) \] 这就是 PDHG 算法,其中 \(\sigma\tau=\alpha\le 1/\|A\|^2\)。
当然,我们还可以对 PDHG 算法进行改进,比如:
PDHG withover relaxation:\(\rho_k\in(0,2)\) \[ \begin{aligned} \bar{x}_{k+1} &=\operatorname{prox}_{\tau f}\left(x_{k}-\tau A^{T} z_{k}\right) \\ \bar{z}_{k+1} &=\operatorname{prox}_{\sigma g^{*}}\left(z_{k}+\sigma A\left(2 \bar{x}_{k+1}-x_{k}\right)\right) \\ \left[\begin{array}{c} x_{k+1} \\ z_{k+1} \end{array}\right] &=\left[\begin{array}{c} x_{k} \\ z_{k} \end{array}\right]+\rho_{k}\left[\begin{array}{c} \bar{x}_{k+1}-x_{k} \\ \bar{z}_{k+1}-z_{k} \end{array}\right] \end{aligned} \] 其收敛性与 DR 方法相同。
PDHG with acceleration: \[ \begin{array}{l} x_{k+1}=\operatorname{prox}_{\tau_{k} f}\left(x_{k}-\tau_{k} A^{T} z_{k}\right) \\ z_{k+1}=\operatorname{prox}_{\sigma_{k} g^{*}}\left(z_{k}+\sigma_{k} A\left(\left(1+\theta_{k}\right) x_{k+1}-\theta_{k} x_{k}\right)\right) \end{array} \] 对于强凸函数 \(f\),以及适当的选择 \(\sigma_k,\tau_k,\theta_k\),收敛速度可以达到 \(1/k^2\)。
3. 单调算子
单调算子(monotone operator)我们在讲次梯度的时候提到过,这次我们从算子的角度理解一下 PDHG 方法。
3.1 集值算子
集值算子(Multivalued/set-valued operator),就是说映射得到的不是单个的值,而是一个集合。比如算子 \(F\) 把向量 \(x\in R^n\) 映射到集合 \(F(x)\subseteq R^n\)。有两个定义
- 定义域 \(\operatorname{dom} F =\left\{x \in \mathbf{R}^{n} | F(x) \neq \emptyset\right\}\)
- 图 \(\operatorname{gr}(F) =\left\{(x, y) \in \mathbf{R}^{n} \times \mathbf{R}^{n} | x \in \operatorname{dom} F, y \in F(x)\right\}\)

对算子放缩、求逆等操作都可以表示为对“图”的线性变换。
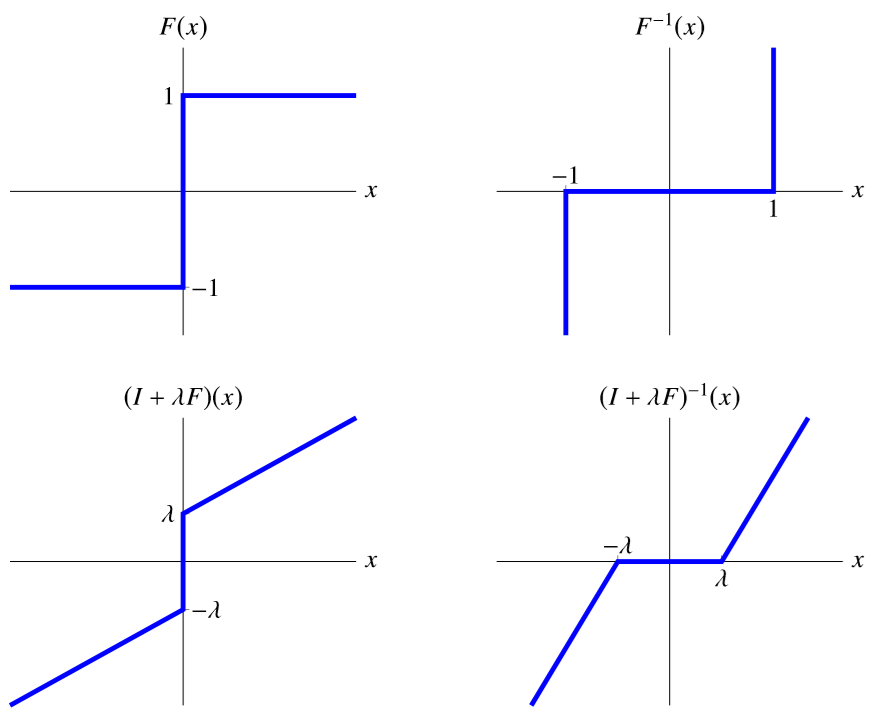
求逆:\(F^{-1}(x)=\{y| x\in F(y)\}\) \[ \operatorname{gr}\left(F^{-1}\right)=\left[\begin{array}{cc} 0 & I \\ I & 0 \end{array}\right] \operatorname{gr}(F) \] 放缩:\((\lambda F)(x)=\lambda F(x)\) and \((F\lambda)(x)=F(\lambda x)\) \[ \operatorname{gr}(\lambda F)=\left[\begin{array}{cc} I & 0 \\ 0 & \lambda I \end{array}\right] \operatorname{gr}(F), \quad \operatorname{gr}(F \lambda)=\left[\begin{array}{cc} (1 / \lambda) I & 0 \\ 0 & I \end{array}\right] \operatorname{gr}(F) \] 相加:\((I+\lambda F)(x)=\{x+\lambda y | y \in F(x)\}\) \[ \operatorname{gr}(I+\lambda F)=\left[\begin{array}{cc} I & 0 \\ I & \lambda I \end{array}\right] \operatorname{gr}(F) \] 注意 \((I+\lambda F)\) 这个形式很特别,如果我们取 \(F(x)=\partial f(x)\),那么 \((I+\lambda F)^{-1}\) 实际上就是 \(\text{prox}\) 算子(\(\lambda>0\)),不过我们给他取了另一个名字 Resolvent,\(y\in(I+\lambda F)^{-1}(x)\iff x-y\in\partial f(y)\),用图来表示就是 \[ \operatorname{gr}\left((I+\lambda F)^{-1}\right)=\left[\begin{array}{cc} I & \lambda I \\ I & 0 \end{array}\right] \operatorname{gr}(F) \] 例子 1:\((I+\lambda \partial f(x))^{-1}=\text{prox}_{\lambda f}(x)\)
例子 2:\(F(x)=Ax+b\),\((I+\lambda F)^{-1}(x)=(I+\lambda A)^{-1}(x-\lambda b)\),后面这个求逆完全就是矩阵求逆。
3.2 单调算子
定义:\(F\) 是单调算子,若 \[ (y-\hat{y})^{T}(x-\hat{x}) \geq 0 \quad \text { for all } x, \hat{x} \in \operatorname{dom} F, y \in F(x), \hat{y} \in F(\hat{x}) \] 如果用图表示,就应该有 \[ \left[\begin{array}{c}x-\hat{x} \\y-\hat{y}\end{array}\right]^{T}\left[\begin{array}{cc}0 & I \\I & 0\end{array}\right]\left[\begin{array}{c}x-\hat{x} \\y-\hat{y}\end{array}\right] \geq 0 \quad \text { for all }(x, y),(\hat{x}, \hat{y}) \in \operatorname{gr}(F) \quad (\bigstar) \] 上面这个式子很重要!!!后面会多次用到。
例子:我们需要用到的单调算子有:
- 凸函数次梯度 \(\partial f(x)\)
- 仿射变换 \(F(x)=Cx+d\),并且需要满足 \(C+C^T\succeq 0\)
- 他们的组合,比如
\[ F(x, z)=\left[\begin{array}{cc} 0 & A^{T} \\ -A & 0 \end{array}\right]\left[\begin{array}{c} x \\ z \end{array}\right]+\left[\begin{array}{c} \partial f(x) \\ \partial g^{*}(z) \end{array}\right] \]
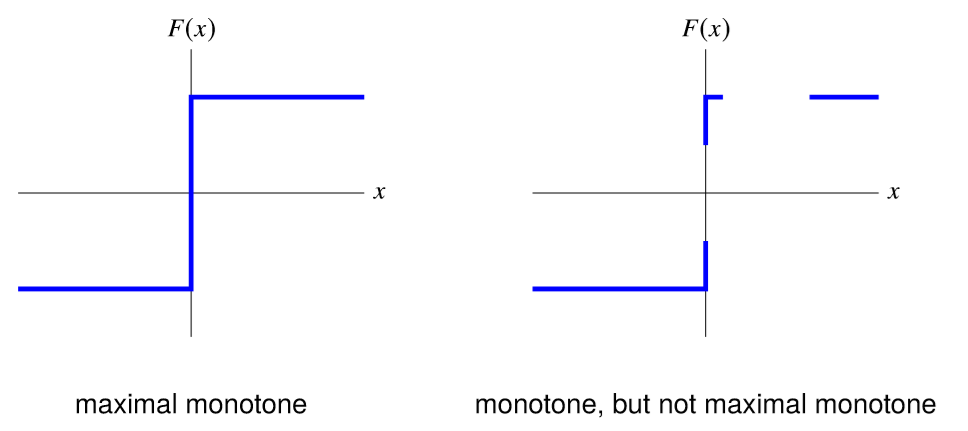
除了单调算子,还有个最大单调算子(Maximal monotone operator),也就是说它的图不能是其他任意单调算子的真子集,举个栗子就明白了,参考下面的图。我们可以知道b闭凸函数的偏导数、单调仿射变换是最大单调算子,除此之外,还有定理。
Minty’s Theorem:单调算子 \(F\) 是最大单调算子当且仅当 \[
\operatorname{im}(I+F)=\bigcup_{x \in \operatorname{dom}
F}(x+F(x))=\mathbf{R}^{n}
\] 
除了单调性质,我们在证明收敛新的时候往往还要用到 Lipschitz 连续、强凸性质等等,实际上我们前面已经介绍过很多次了,而且用了一堆名词 coercivity、expansive、firmly nonexpansive,我实在是晕了......这里我们就再总结一下。假设算子 \(F\) 有 \(y=F(x),\hat{y}=F(\hat{x})\)
| \((y-\hat{y})^T(x-\hat{x})\ge \mu \Vert x-\hat{x}\Vert^2,\mu>0\) | \((y-\hat{y})^T(x-\hat{x})\ge \gamma \Vert y-\hat{y}\Vert^2,\gamma>0\) | $(y-)T(x-)Lx-2 $ |
|---|---|---|
| coercive | co-coercive | |
| firmly nonexpansive(\(\gamma=1\)) | nonexpansive(\(L\le 1\)) | |
| Lipschitz continuous |
它们之间的关系
- 如果满足 co-coercive 并且有 \(\gamma=1\),则其为 firmly nonexpansive
- 如果满足 Lipschitz continuous 并且有 \(L\le 1\),则其为 nonexpansive
- co-coercivity 可以导出 Lipschitz continuous(\(L=1/\gamma\)),但反之不一定。不过对于闭凸函数他们是等价的。
它们各自的性质
Coercivity等价于 \(F-\mu I\) 是一个单调算子,也等价于 \[ \left[\begin{array}{c} x-\hat{x} \\ y-\hat{y} \end{array}\right]^{T}\left[\begin{array}{cc} -2 \mu I & I \\ I & 0 \end{array}\right]\left[\begin{array}{c} x-\hat{x} \\ y-\hat{y} \end{array}\right] \geq 0 \quad \text { for all }(x, y),(\hat{x}, \hat{y}) \in \operatorname{gr}(F) \] Co-coercivity等价于 \[ \left[\begin{array}{c} x-\hat{x} \\ y-\hat{y} \end{array}\right]^{T}\left[\begin{array}{cc} 0 & I \\ I & -2 \gamma I \end{array}\right]\left[\begin{array}{c} x-\hat{x} \\ y-\hat{y} \end{array}\right] \geq 0 \quad \text { for all }(x, y),(\hat{x}, \hat{y}) \in \operatorname{gr}(F) \]
对前面提到的 resolvent 来说,算子单调性有以下重要性质:
重要性质:算子是单调的,当且仅当他的 resolvant 是 firmly nonexpansive
证明只需要根据矩阵等式 \(\lambda\left[\begin{array}{ll}0 & I \\ I & 0\end{array}\right]=\left[\begin{array}{cc}I & I \\ \lambda I & 0 \end{array}\right]\left[\begin{array}{cc}0 & I \\ I & -2 I \end{array}\right]\left[\begin{array}{cc}I & \lambda I \\ I & 0 \end{array}\right]\) 就可以得到(结合 \((\bigstar)\) 式)。
另外单调算子 \(F\) 是最大单调算子,当且仅当 \[ \text{dom}(I+\lambda F)^{-1}=R^n \] 这可以由 Minty’s theorem 得到。
4. 近似点算法
4.1 回望 PPA
前面讲到了 Resolvant \((I+\lambda F)^{-1}\) 实际上就是近似点算子,而 PPA 就是在计算近似点,回忆 PPA 的迭代格式为 \[ \begin{aligned} x_{k+1} &= \text{prox}_{t_k f}(x_k) \\ &= (1+t_k F)^{-1}(x_k) \end{aligned} \] 我们实际上就是在找 Resolvant 算子 \(R_t=(I+t F)^{-1}\) 的不动点 \[ x=R_t(x)\iff x\in(1+tF)(x)\iff 0\in F(x) \] 加入松弛后的 PPA 可以写成下面的形式,其中 \(\rho_k\in(0,2)\) 为松弛参数 \[ x_{k+1}=x_k+\rho_k(R_{t_k}(x_k)-x_k) \] 那么收敛性是怎么样呢?假如 \(F^{-1}(0)\neq \varnothing\),在满足以下条件时 PPA 可以收敛
- \(t_k=t>0,\rho_k=\rho\in(0,2)\) 都选择常数值;或者
- \(t_k,\rho_k\) 随迭代次数变化,但是需要满足 \(t_k\ge t_{\min}> 0,0<\rho_{\min}\le \rho_k\le \rho_{\max}< 2,\forall k\)
这个收敛性的证明可以通过证明 Resolvant 的 firmly nonexpansiveness 性质来完成(可以去复习 DR 方法的收敛性证明,那里实际上也是一个不动点迭代)。
4.2 再看 PPA
先打个预防针,这一部分很重要!!!看完以后也许会对 PPA 以及其他优化算法有更多的理解!!!
首先我们回忆 PPA 是什么。对于优化问题 \(\min f(x)\),迭代格式为 \(x^+=\text{prox}_{tf}(x)\)。如果我们把 \(\partial f(x)\) 用算子 \(F\) 来表示,那么优化问题实际上就是在找满足 \(0\in F(x)\) 的解,PPA 实际上就是在找不动点 \(x=(1+tF)^{-1}(x)\)。
假如我们现在引入一个非奇异矩阵 \(A\),令 \(x=Ay\) 代入到原方程(为什么要这么做?如果合适地选择 \(A\) 的话,有时候可以使问题简化,跟着推导的思路看到最后就能理解了,来吧!)
记 \(g(y)=f(Ay)\),那么优化问题变为了 \(\min g(y)\),注意由于 \(A\) 是非奇异的,所以这个问题跟原问题 \(\min f(x)\) 是等价的。我们需要找满足 \(0\in\partial g(y)=A^T\partial f(Ay)\) 的解,于是可以定义算子 \(G(y)=\partial g(y)=A^TF(Ay)\),这个时候 \(G\) 的图就是做一个线性变换 \[ \operatorname{gr}(G)=\left[\begin{array}{cc}A^{-1} & 0 \\0 & A^{T}\end{array}\right] \operatorname{gr}(F) \] 如果 \(F\) 是一个单调算子的话,那么 \(G\) 也是一个单调算子,这是因为(结合 \((\bigstar)\) 式) \[ \left[\begin{array}{cc}A^{-1} & 0 \\0 & A^{T}\end{array}\right]^{T}\left[\begin{array}{cc}0 & I \\I & 0\end{array}\right]\left[\begin{array}{cc}A^{-1} & 0 \\0 & A^{T}\end{array}\right]=\left[\begin{array}{cc}0 & I \\I & 0\end{array}\right] \] 然后对 \(\min g(y)\) 应用 PPA 迭代格式为 \[ y_{k+1}=(I+t_kG)^{-1}(y_k) \] 我们把 \(x_k=Ay_k,G=A^TF(Ay)\) 都代入进去,就能把上面的式子等价表示为 \[ \frac{1}{t_k}H(x_k-x)\in F(x) \] 其中 \(H=(AA^T)^{-1}\succ 0\)。这个式子又可以表示为 \[ x_{k+1}=(H+t_kF)^{-1}(Hx_k) \] 因为 \(\min g(y)\iff \min f(x)\),所以上面这个迭代格式也完全适用于原问题,如果取 \(H=I\) 那就是原始形式的 PPA,如果取别的形式,那么就获得了推广形式的 PPA!
引入 \(A\) 有什么作用呢?我们看 \[ \frac{1}{t_k}H(x_k-x)\in F(x) \iff x_{k+1}=\arg\min_x\left(f(x)+\frac{1}{2t_k}\|x-x_k\|_H^2 \right) \] 其中 \(\|x\|_H^2=x^THx\),如果说 \(f(x)=(1/2)\|Bx-b\|^2\),那么我们就可以选择 \(A\) 使 \(H=(1/\alpha) I-B^TB\),这样迭代求解 \(x_{k+1}\) 就简单了。当然这个作用范围很有限,下面的例子更能显现他的威力。
我们再回到原始对偶问题,记算子 \(F\) 为 \[ F(x,z)=\left[\begin{array}{cc}0 & A^{T} \\-A & 0\end{array}\right]\left[\begin{array}{l}x \\z\end{array}\right]+\left[\begin{array}{c}\partial f(x) \\\partial g^{\star}(z)\end{array}\right] \] 优化问题就是要找到 \(0\in F(x,z)\)。如果用原始的 PPA 算法,迭代方程为 \((x_{k+1},z_{k+1})=(I+tF)^{-1}(x_k,z_k)\),\((x_{k+1},z_{k+1})\) 是下面方程的解

注意到 \(x,z\) 纠缠在一起了,我们想把他们拆开来分别求解 \(x,z\),问题就能更简单。怎么做呢,引入一个 \(H\) \[ H=\left[\begin{array}{cc}I & -\tau A^{T} \\-\tau A & (\tau / \sigma) I\end{array}\right] \] 其中若 \(\sigma\tau\|A\|_2^2< 1\) 则 \(H\) 为正定矩阵。这个时候 \((x_{k+1},z_{k+1})\) 就是下面方程的解 \[ \begin{array}{c} {\frac{1}{\tau}\left[\begin{array}{cc} I & -\tau A^{T} \\ -\tau A & (\tau / \sigma) I \end{array}\right]\left[\begin{array}{c} x_{k}-x \\ z_{k}-z \end{array}\right] \in\left[\begin{array}{cc} 0 & A^{T} \\ -A & 0 \end{array}\right]\left[\begin{array}{c} x \\ z \end{array}\right]+\left[\begin{array}{c} \partial f(x) \\ \partial g^{*}(z) \end{array}\right] }\\ \Updownarrow \\ {\begin{array}{l} 0 \in \partial f(x)+\frac{1}{\tau}\left(x-x_{k}+\tau A^{T} z_{k}\right) \\ 0 \in \partial g^{*}(z)+\frac{1}{\sigma}\left(z-z_{k}-\sigma A\left(2 x-x_{k}\right)\right) \end{array} }\\ \Updownarrow \\ {\begin{aligned} x_{k+1} &=(I+\tau \partial f)^{-1}\left(x_{k}-\tau A^{T} z_{k}\right) \\ z_{k+1} &=\left(I+\sigma \partial g^{*}\right)^{-1}\left(z_{k}+\sigma A\left(2 x_{k+1}-x_{k}\right)\right) \end{aligned} } \end{array} \] 对于化简后的式子,我们就可以先单独求解 \(x_{k+1}\),然后再求解 \(z_{k+1}\)。这实际上也是 PDHG 的迭代方程 \[ \begin{array}{l}x_{k+1}=\operatorname{prox}_{\tau f}\left(x_{k}-\tau A^{T} z_{k}\right) \\z_{k+1}=\operatorname{prox}_{\sigma g^{*}}\left(z_{k}+\sigma A\left(2 x_{k+1}-x_{k}\right)\right)\end{array} \]